Authors:
Mayank Mittal, Calvin Yu, Qinxi Yu, Jingzhou Liu,
Nikita Rudin, David Hoeller, Jia Lin Yuan, Ritvik Singh,
Yunrong Guo Hammad Mazhar, Ajay Mandlekar, Buck Babich,
Gavriel State, Marco Hutter, Animesh Garg
IROS 2023 | RA-L
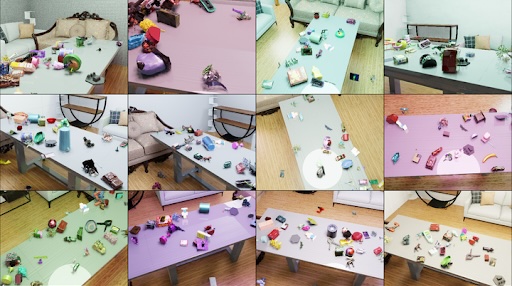
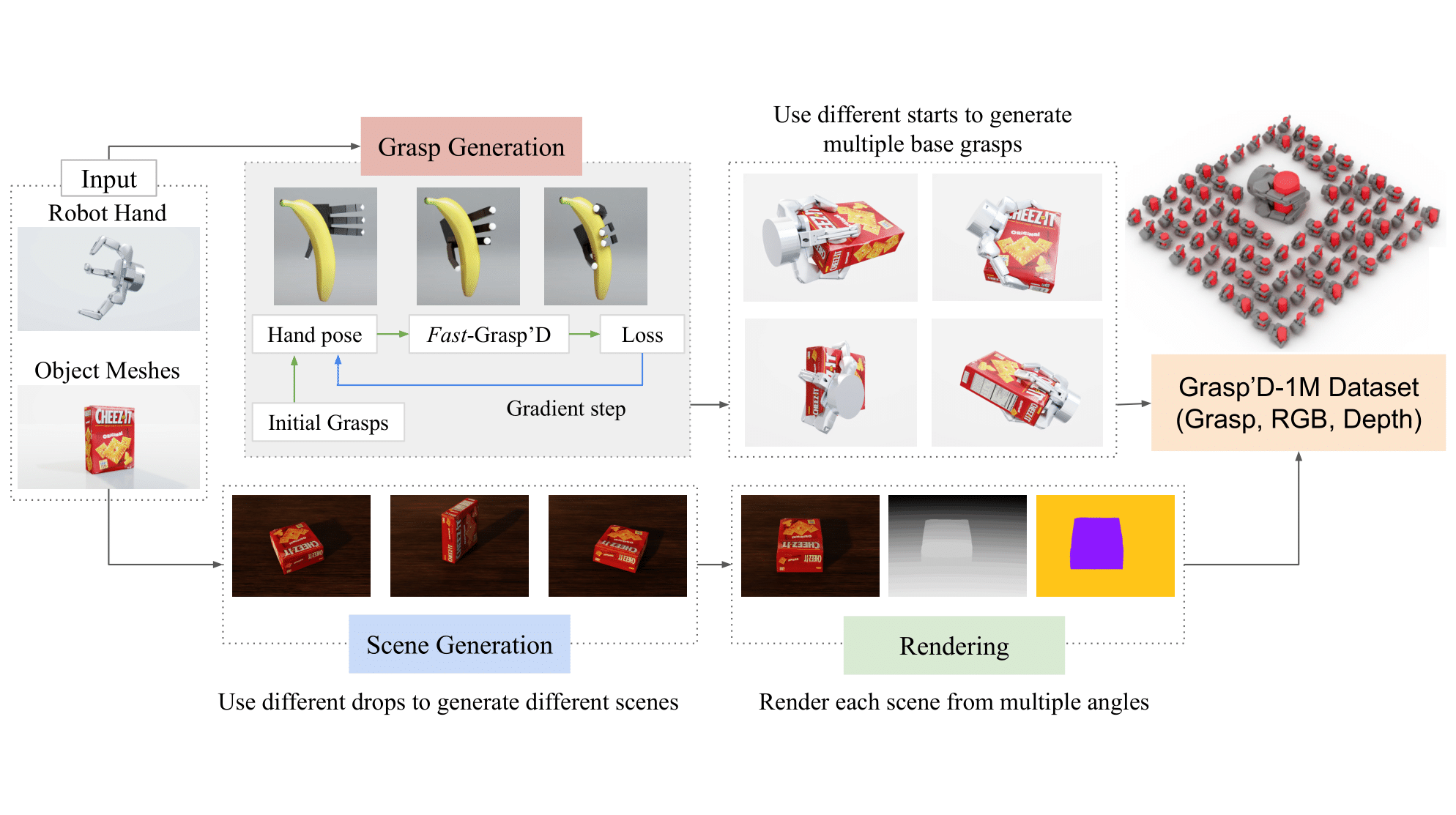
We present ORBIT, a unified and modular framework for robot learning powered by NVIDIA Isaac Sim.
It offers a modular design to easily and efficiently create robotic environments with photo-realistic
scenes and fast and accurate rigid and deformable body simulation. ORBIT allows training reinforcement
learning policies and collecting large demonstration datasets from hand-crafted or expert solutions in
a matter of minutes by leveraging GPU-based parallelization. With this framework, we aim to support
various research areas, including representation learning, reinforcement learning, imitation learning,
and task and motion planning.